– Can you briefly tell us about your PhD topic?
– I have researched collaboration between humans and robots – and in particular how robots can help humans, for example, in lifting objects. In my research, I programmed robots to recognize certain human movements, and then respond with some action. I have been part of the Teknoløft project, a project that aims to help businesses in the local environment – especially small and medium-sized enterprises – adopt more technology.
– Why was there a doctorate in this particular subject?
— Before I started my PhD, I studied surgical robotics in Izmir, Turkey, the country where I come from. In my master's project, I also used this type of sensor, inertial measurement units, and I thought it would be interesting to do something else with them as well. This was one of the things that made me think about applying for this scholarship when I saw the ad on LinkedIn.
-Then I moved from Izmir to Ford.
— Yes, then it became Sunnfjording. I moved to Norway in September 2018, and then it rained continuously for 40 days. I knew very little at the time, so I must say I wondered what I had gotten myself into. Fortunately, it worked out when I started networking at work, I was very lucky with my colleagues and quickly fell into the environment here. But it's clear: the transition from sun and heat via the Aegean Sea to rainy and acidic western Norway was a big deal.
– Can you briefly introduce your project?
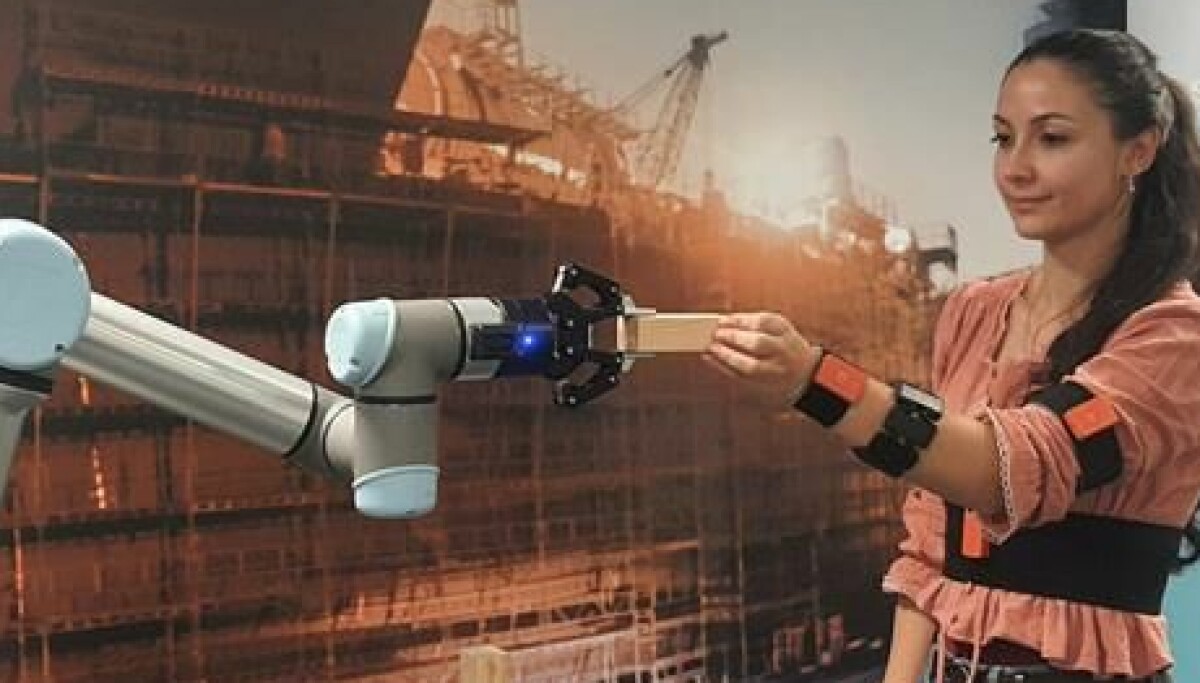
– I wanted to see how we could find a way to make robots “read” human movements and respond to them automatically, so they could help with many useful tasks. In many workplaces, for example a furniture factory, a lot of lifting operations are performed. I wanted to see if I could figure out how robots could interact with workers to help with this – and in a safe and secure way. In my experiments, I used inertial measurement units, a type of sensor attached to the body, which sends signals to the robot. The robot interpreted the movements and helped lift the table with someone – and drop it again, and then we had the robot do that as well. Lifting and releasing can only be done by following human movements.
I moved to Norway in September 2018, and then it rained continuously for 40 days. I knew very little at the time, so I must say I wondered what I had gotten myself into.
Gizem Atish Vinas
-Is this new technology?
– Both and. The sensors themselves are widely used, perhaps in your phone, for example. The film industry also uses this type of sensor a lot to create animation. But previous attempts to make robots read human movements have tended to use cameras and video. You can then get an accurate measurement of movement, but there are also some other uncertainties – something could happen between the camera and the person being measured, or the lens could become covered in dust. It's too risky, and we don't want to bring unsafe technology into the workplace. But if you use these sensors that I used, you don't even have to be in the same room. You can additionally use cameras to get more accurate results.
– How easy is it for people to collaborate with robots?
– I discovered that it is possible to make it completely user-friendly for those who will be working with them. When I piloted it, I set up a prototype with a “boxed” training setup and asked 32 people to test the system. These were completely ordinary people in the age group of 20-54 years, in different professional groups and without any kind of special knowledge about robots or this kind of technology. This survey showed that anyone can use the system with relatively little prior training.
– What other things can a robot help with?
– As a contribution to leverage, it is useful. It can reduce the burden on people working in production. But robots can also help with other things, such as handling or manipulating different objects, or putting things together and grouping them with people. I also envision that this technology could be used in healthcare to help healthcare workers, for example, transport patients, which could simplify daily work and reduce sickness absence.
– Who can use this technology?
– Robots have been used in factories for a long time, so big companies probably don't need this technology here. They already have large production lines where robots contribute to many different tasks. But most small and medium-sized companies cannot afford to invest in this, and there are many such companies in Norway.
-Were you surprised by anything while working?
— It wasn't a big part of what I was doing in my PhD, but I started to learn a little bit about artificial intelligence or machine learning, and how that could be used in robotics. There are many articles about machine learning/AI in robotics – for example, to calibrate equipment or teach robots to do things better, easier and behave more naturally. But I think that AI in robotics is not yet used to its full potential – the opportunities that AI provides can really improve this field in the future.
Ph.D
More than 1,500 doctoral theses are delivered in Norway every year. Khrono presents in the series some of the candidates who recently defended their thesis. I accept advice on more at [email protected]
– Robots and artificial intelligence, you have a good combination there!
– Yes, and we have not reached this point yet. I was surprised to read in one article how far behind robotics there is artificial intelligence – even though research in both areas began around 1950. We see many “cool” videos on social media, with robots jumping, dancing, running, etc. , with robots that have been coded. They run deterministic control algorithms where some parameters are fine-tuned. There we encounter Moravec's paradox. It is a phenomenon that states that high-level thinking requires little computing, while low-level sensory-motor skills require vast computing resources. In other words, it is easy for an AI to learn a language, solve a math problem, and play chess. All of this requires high-level thinking and skill. In contrast, he is bad at learning simple sensory skills such as walking, smiling, or moving objects.
-What is the most demanding part of your PhD?
– The deadlines. I guess I have to be honest and say that. I, like many others, have had the experience of suddenly having to do research during a pandemic, with everything that has followed. Since I was working with robots, I had to be physically on campus to do the work. But I was lucky, because I was allowed on campus most of the time. Maybe we got an exception because there were too few of us gathered in the same place? Or perhaps it was because robots were unable to infect anyone.
I want to stay here at Ford. After all, I married a local and learned the Norwegian accent, so I can't move.
Gizem Atish Vinas
-Do you regret starting this?
– no I did not. But sometimes I thought: Why am I really doing this? It takes a lot of energy to get a PhD. And I have friends I've studied with in the past who finished their work day and came home at 5:30, while I sat in the lab and had to keep going.
-What will you use most in the thesis?
— Now I have a teaching position here at Ford, which I enjoy. This project, Teknoløft, is coming to an end, but we are writing about new projects. I would like to continue research and development in this area, as well as work more with machine learning and robotics. Additionally, I want to mix health technology with robotics. But I want to stay here at Ford. After all, I married a local and learned the Norwegian accent, so I can't move.

“Web specialist. Lifelong zombie maven. Coffee ninja. Hipster-friendly analyst.”



